
咨询热线
010-85576668-622
010-85576668-622
浏览次数: 时间:2024-12-21 15:29:34
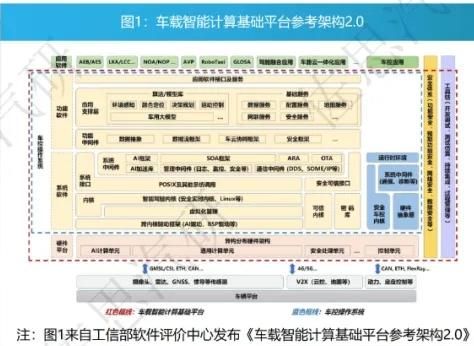
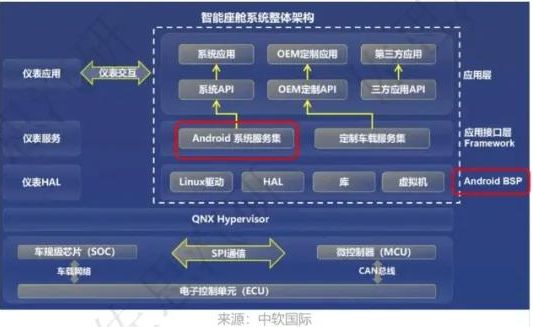
汽车操作系统(简称Car-OS)是运行在异构分布硬件架构上的实时安全平台软件,它提供了一系列的功能框架,这些框架为整车及部件的感知、规划、控制等功能提供了必要的支持和保障,并向上支撑智能网联汽车生态的软件集合。
汽车电子电气架构逐步从分布式到域集中式到中央计算架构,对应的操作系统也逐步从分布式嵌入操作系统发展到域集中操作系统,同时面向中央计算架构的基于SOA软件体系的整车操作系统也在兴起。
目前量产汽车操作系统主要是域集中式操作系统,一般包括3个以上的子系统,对车身、座舱、自动驾驶分别控制。杏彩体育注册登录官网
整车操作系统被越来越多厂商提及,且有部分主机厂和供应商发布了整车操作系统,但各家的定义和解决方案差别很大,对整车操作系统的形态存在争论。
自动驾驶解决方案逐步从模块化控制发展到基于大模型的端到端控制,适应端到端自动驾驶的操作系统也在转变之中,同时也在探索多种开发合作模式。
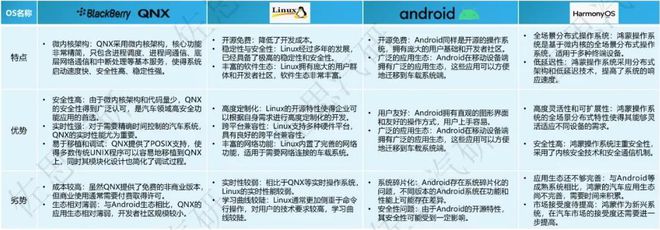
基础型操作系统格局稳定,QNX、linux和安卓系统呈三足鼎立之势,且各有优先适配的场景;国产基础操作系统方面,华为鸿蒙在快速发展,版本迭代、生态系统建设都在快速建设之中,配合鸿蒙智行系列车型的发展,也将在车载操作系统领域获得一定的市场份额;诸如睿赛德等公司从物联网操作系统的积累,也在打造汽车行业的操作系统解决方案。
整车操作系统不是推倒重来,而是在原有域集中操作系统的基础上增加了中间件和OS工具链,进行跨域的通信和算法、资源调度。比如东软睿驰即将发布的整车操作系统解决方案;因此面向整车操作系统的生态有扩大的趋势,为各软件供应商提供了更多机遇。
类似特斯拉的软硬件全栈自研路径有很高的规模壁垒、资金壁垒和人才壁垒,对于大多数主机厂并不适用;采用自主定义软件架构和优先开发应用层的原则,广泛与第三方供应商合作,才将是行业主流。
各类软件开放组织和开放联盟在推动汽车操作系统发展过程中扮演了重要角色,过去AUTOSAR CP相关标准对行业有重要影响,AUTOSAR AP在AUTOSAR开放战略的推动下也会获得一定的发展;同时,国产操作系统开源计划也在持续推进。
汽车操作系统(简称Car-OS)是运行在异构分布硬件架构上的实时安全平台软件,它提供了一系列的功能框架,这些框架为整车及部件的感知、规划、控制等功能提供了必要的支持和保障,并向上支撑智能网联汽车生态的软件集合。作为汽车智能计算基础平台的重要组成部分,汽车操作系统是确保汽车安全、实时和高效运行的重要基础和核心支撑。从类型上来看杏彩体育,汽车操作系统可以分为狭义和广义两种。狭义的汽车操作系统单指系统软件中的操作系统内核部分,而广义的汽车操作系统则包含了功能软件和系统软件等多个层级,本报告的研究对象为广义操作系统。
管理与调度:汽车操作系统负责管理和调度汽车的硬件和软件资源,类似于一个“总管家”的角色,确保各个部件和系统能够协调、高效地工作。
实时性与安全性:由于汽车行驶过程中的安全性和实时性要求极高,汽车操作系统需要具备高实时性和高安全性的特点,以应对各种突发情况和复杂场景。
功能框架:汽车操作系统提供了一系列的功能框架,这些框架为整车及部件的感知、规划、控制等功能提供了必要的支持和保障。
生态支撑:汽车操作系统还向上支撑智能网联汽车生态,为各种智能网联应用和服务提供基础平台,推动汽车行业的智能化和网联化发展。

汽车操作系统的分类主要依据其功能和应用领域进行划分。全国汽车标准化技术委员会在2019年发布的《车用操作系统标准体系》中,将汽车操作系统分为车控和车载两类。车控操作系统即车辆控制领域,主要包括安全和智能驾驶;车载操作系统则主要面向信息娱乐和智能座舱领域。
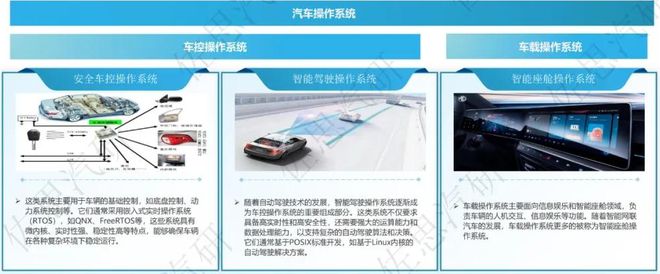
车控操作系统主要面向经典车辆控制领域,如动力系统、底盘系统和车身系统等,对实时性和安全性要求极高。为保证车辆的安全可靠,车控操作系统一般需要满足ASIL-B 以上等级功能安全要求(安全车控操作系统需满足ASIL-D),并根据自动驾驶需求进行适度扩展。车控操作系统包括系统软件和功能软件。系统软件创建了复杂嵌入式系统的运行环境,包含内核以及与AUTOSAR软件架构类似并兼容的中间件层,系统软件运行在通用计算单元与控制单元上。功能软件利用硬件及系统软件接口,针对智能驾驶应用提供实时、安全框架,算法共性组件及重要服务等通用模块。
早期的机械控制阶段,汽车最初的控制系统由机械元件实现,如油门、刹车、离合器等。这些机械元件的设计和制造需要耗费大量的人力和物力,而且容易出现故障;
电子控制阶段,随着电子技术的发展,汽车控制系统开始采用电子元件,如传感器、执行器等。该方式能够提高控制精度和可靠性,但仍然需要人工进行调整和维护;
网络化控制阶段,随着互联网技术的普及,汽车控制系统进一步实现网络化,车控操作系统也出现了AUTOSAR(Automotive Open SystemArchitecture)等标准通信中间件。该方式实现车辆与外部环境的信息交换和数据共享,提高了驾驶体验和安全性;
自主控制阶段,近年来,人工智能技术的兴起使得汽车控制系统开始向自主控制方向发展。自主控制系统能够学习和适应不同的驾驶环境和驾驶者行为,实现更加智能化的驾驶体验。

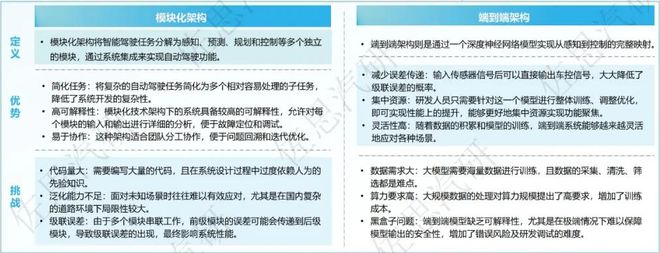
目前量产的智能驾驶系统多采用模块化架构,但端到端架构凭借其高效性和灵活性正逐渐成为行业关注的热点。未来随着技术的不断进步和数据资源的不断丰富,端到端架构有望在智能驾驶领域发挥更大的作用。不过,无论采用哪种架构,提高驾驶安全性和便捷度始终是智能驾驶技术的核心目标。

智能座舱操作系统主要为汽车信息娱乐服务以及车内人机交互提供控制平台,是汽车实现座舱智能化与多源信息融合的运行环境,对操作系统的实时性与可靠性要求并不严苛。主流车型的智能座舱操作主要包括QNX、Linux、Android等,传统智能座舱操作系统中QNX占据了绝大部分份额,近年来,智能座舱的娱乐与信息服务属性越发凸显,开源的Linux以及在手机端拥有大量成熟信息服务资源的Android被众多主机厂青睐,成为后起之秀。
2014年左右,汽车行业开始引入早期的智能座舱操作系统(当时叫IVI系统),它不仅是车载娱乐系统,更是一个智能互联系统,提供网络服务和智能娱乐功能。然而,基于Linux或QNX的IVI 1.0系统设计虽简单,但存在迭代周期长、稳定性差及GUI框架不成熟等问题。
2016年左右的第二代IVI系统旨在集成更多功能并提升用户体验。这包括ADAS、混动技术、车辆设置等,同时引入自定义应用和ECU交互。系统框架也发生变革,如引入成熟的安卓系统,提升体验并减少开发工作量。但安卓系统对稳定性和实时性要求较高,需引入虚拟化技术,
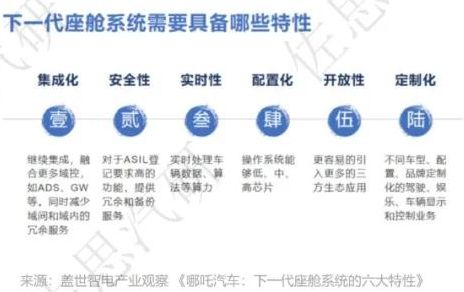
新一代座舱操作系统的核心在于满足座舱集成化的需求。在座舱集成过程中,许多零部件已被整合。新一代座舱操作系统的持续迭代,大幅减少了IVI 2.0所需的定制工作,为开发人员带来了便利。跨域的SOA通信则增强了域间交互,促进了数据融合,创造出更多酷炫和融合功能。
国外厂商QNX(Blackberry)、Linux(开源)、Andorid(Google)构成车载操作系统三大阵营且较为稳定。国外多基于Linux开发,国内多基于Andorid开发;而有着高实时性,安全性的自动驾驶控制系统目前仍多以Linux/QNX开发为主。
底层的基础操作系统研发是一个系统工程,开发难度大、开发周期较长,需要投入大量的人力、财力,基本没有企业会全新开发基础操作系统,目前基础操作系统主要被国外垄断,国内只有华为鸿蒙在开发基础操作系统。

大众汽车操作系统(VW.OS) 是 CARIAD 技术堆栈中所有基于软件的功能的核心,VW.OS将大众汽车内部开发与第三方解决方案相结合,形成一个可扩展的统一软件平台。
最底层是硬件层,由统一、可扩展的端到端电子架构组成。其中包括区域、高性能计算机和定制半导体。
这两层之间是VW.OS操作系统,VW.OS与其他软件功能(如 OTA 功能、Big Loop数据聚合系统和VW.AC(大众汽车云))并存。VW.OS包括SDK(软件开发工具包)、参考应用程序、运行时软件组件以及用于嵌入式软件和云连接的配置工具。
CARIAD中国与地平线、中科创达等中国市场供应商一起共同开发高级自动驾驶辅助系统及智能座舱功能,以期为大众CEA架构的车辆赋能。CEA电子电气架构是大众与小鹏汽车等合作开发的。
虽然安全性、稳定性不足,但由于车载信息娱乐系统对安全性要求相对较低,Android仍然凭借其上述优点在国内车载信息娱乐系统领域占据主流地位。尤其是自主品牌、造车新势力纷纷基于Android进行定制化改造,推出了自己的汽车操作系统,如蔚来NIO OS、小鹏XmartOS等。
基于Linux内核并采用GPL许可证,开源特性显著降低了厂商成本,促进了技术的广泛共享与创新。
得益于Java的跨平台能力,Android应用能够无缝运行于各种Android设备上,极大地拓宽了应用的适用范围,并简化了开发流程。
Android已构建起庞大的应用生态圈,丰富的应用资源不仅提升了用户体验,还吸引了更多开发者加入,形成了良性循环,进一步推动了Android的普及与发展。
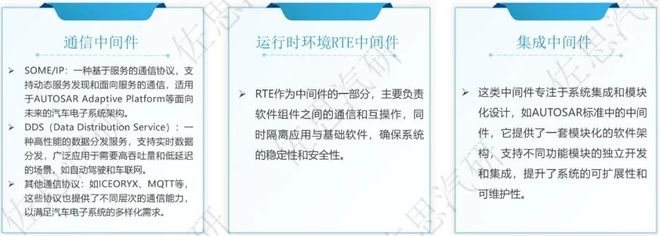
汽车软件中间件是广义汽车操作系统中一个至关重要的组成部分,它位于应用层和基础操作系统之间,起到了连接和协调不同电子控制单元(ECU或DCU)的作用。
海外Tier1基于传统的ECU基础软件平台发展中间件业务,国内的Tier1多基于域发展中间件业务;还有部分独立软件供应商基于安全、通信、智能网关、智能驾驶人机交互等独特的软件能力发展中间件业务。

Covesa 原名GENIVI,于2021年改名Covesa,是一个非营利性的汽车联盟,致力于发展和支持车载信息娱乐系统(IVI)的开源开发平台。2009年,宝马、通用汽车、英特尔等头部企业联合成立Covesa联盟,旨在提供车载信息娱乐平台适用标准和开放源代码,与全球汽车技术提供商协同开发提升汽车功能的解决方案,加速智能网联汽车技术的创新发展。
经过多年发展,Covesa联盟已汇集全球100多名成员,包括各大汽车制造商、一级供应商、半导体供应商、软件开发商和服务提供商,在开源车载信息娱乐开发方面始终处于领导地位。
Covesa联盟开发了集成操作系统和中间件的标准方法,这些操作系统和中间件计划在具备车联网功能的车辆驾驶舱中进行搭载。该联盟将Android汽车、AUTOSAR、Linux和其他车载软件的采用者与解决方案供应商联系起来,形成一个全球100多名成员的高效协作社区。
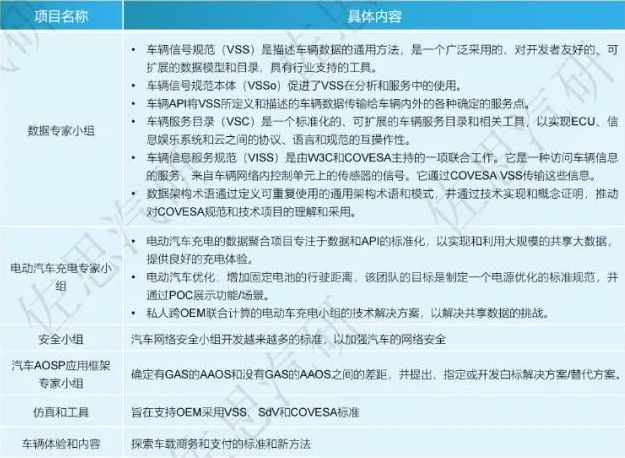
截至2024年2月,Covesa联盟有3个创始成员,11个核心成员,37个协会成员,26个联合成员。

AUTOSAR是AUTOmotive Open System Architecture(汽车开放系统架构)的首字母缩写,由汽车制造商,供应商以及工具开发商联合开发,致力于为汽车工业开发一个开放的、标准化的软件架构。AUTOSAR这个架构有利于汽车电子系统软件的交换与更新,并为高效管理愈来愈复杂的汽车电子、软件系统提供了一个基础。AUTOSAR在确保产品及服务质量的同时,提高了成本效率。该架构下,硬件和软件以及不同的软件组件之间的分离是通过基础软件包(BSW)进行的。AUTOSAR基础软件(BSW)进一步划分为服务层、ECU抽象层、微抽象层和复杂驱动层。
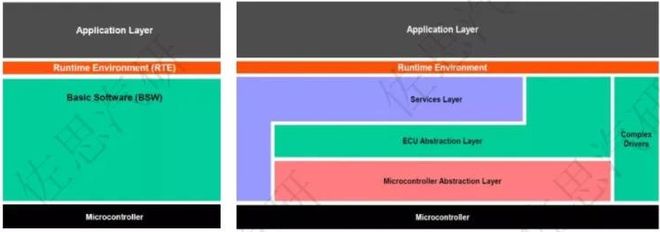
RTE全称是Runtime Enviranment,采用RTE实现了ECU内部和ECU之间的节点通讯,RTE处于功能软件模块和基础软件模块之间,使得软件集成更加容易。
针对功能和通讯总线制定了标准的测试规范,测是规范涵盖的范围包括对于AUTOSAR的应用兼容性(例如RTE的需求,软件服务行为需求和库等)和总线兼容性(总线处理行为和总线协议等),它的目标是建立标准的测试规范从而减少测试工作量和成本。

1、如欲获取完整版PDF文件,可以关注钛祺汽车官网—智库,也可以添加钛祺小助理微信,回复“报告名称:2024年汽车操作系统趋势及TOP10分析报告”
3、钛祺智库持续更新、收录行业深度技术文章、研究报告,并不定期上传行业专家特约文章,为汽车行业朋友提供专业支持。





